Autonomous Underwater Vertical Profiler
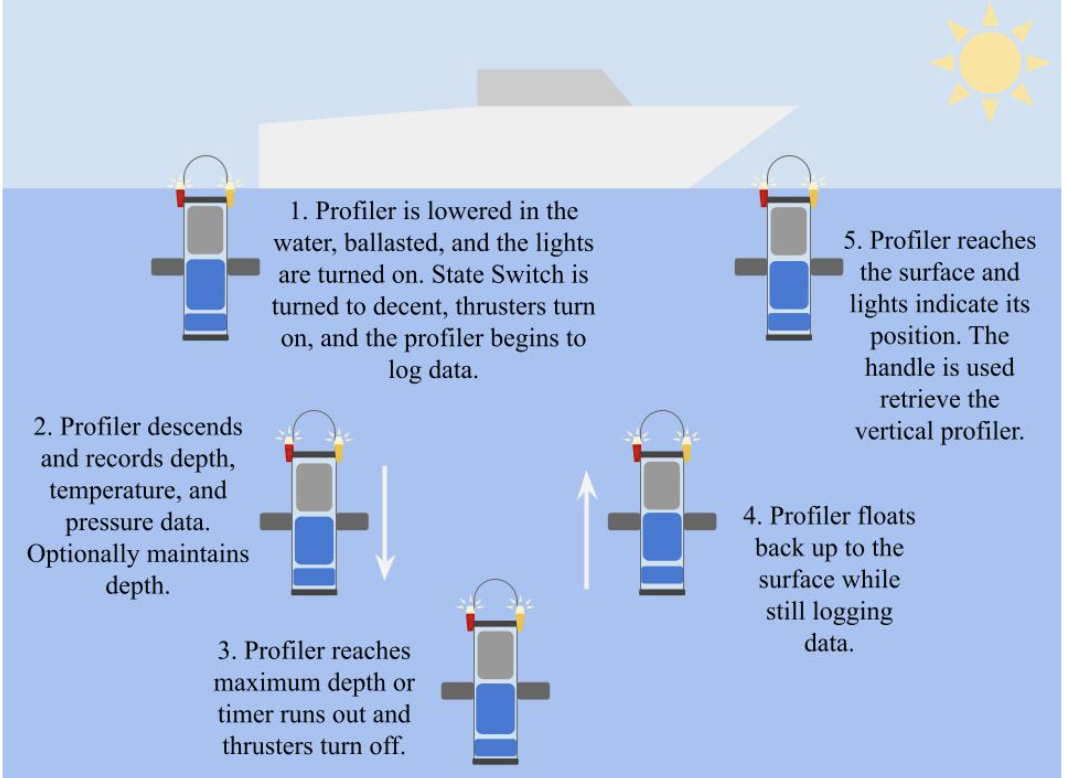
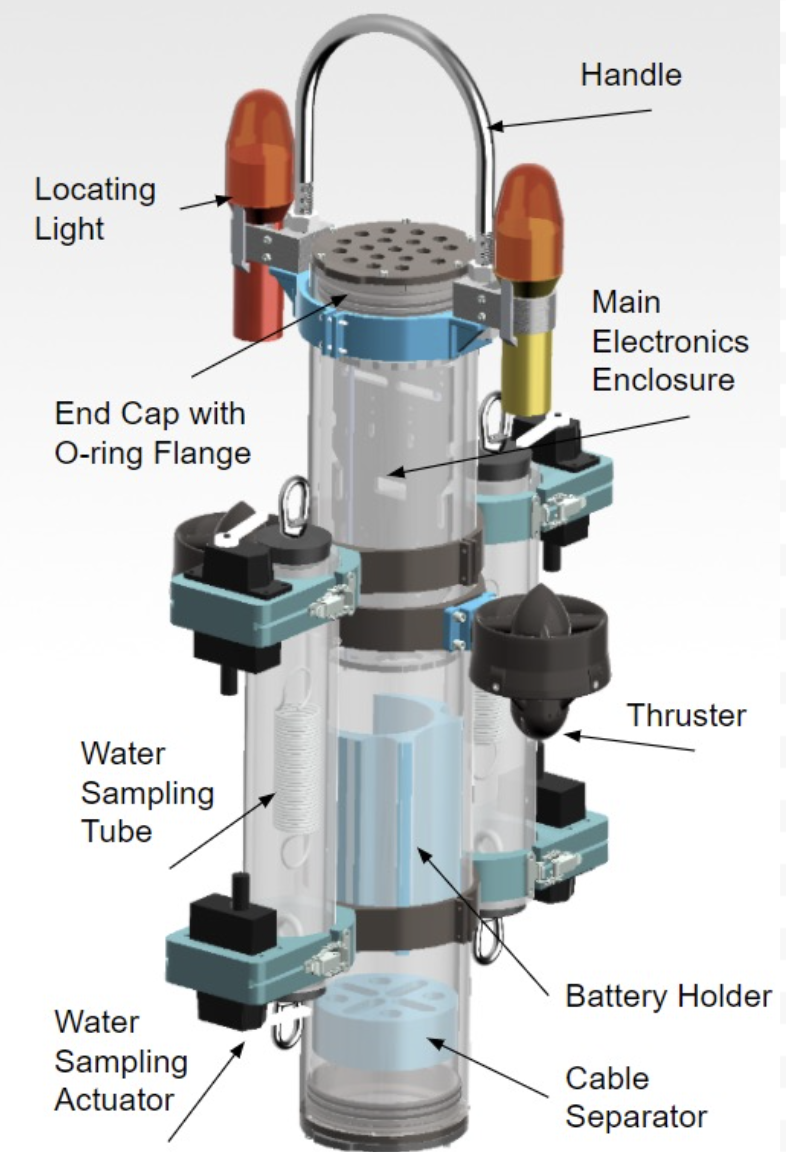
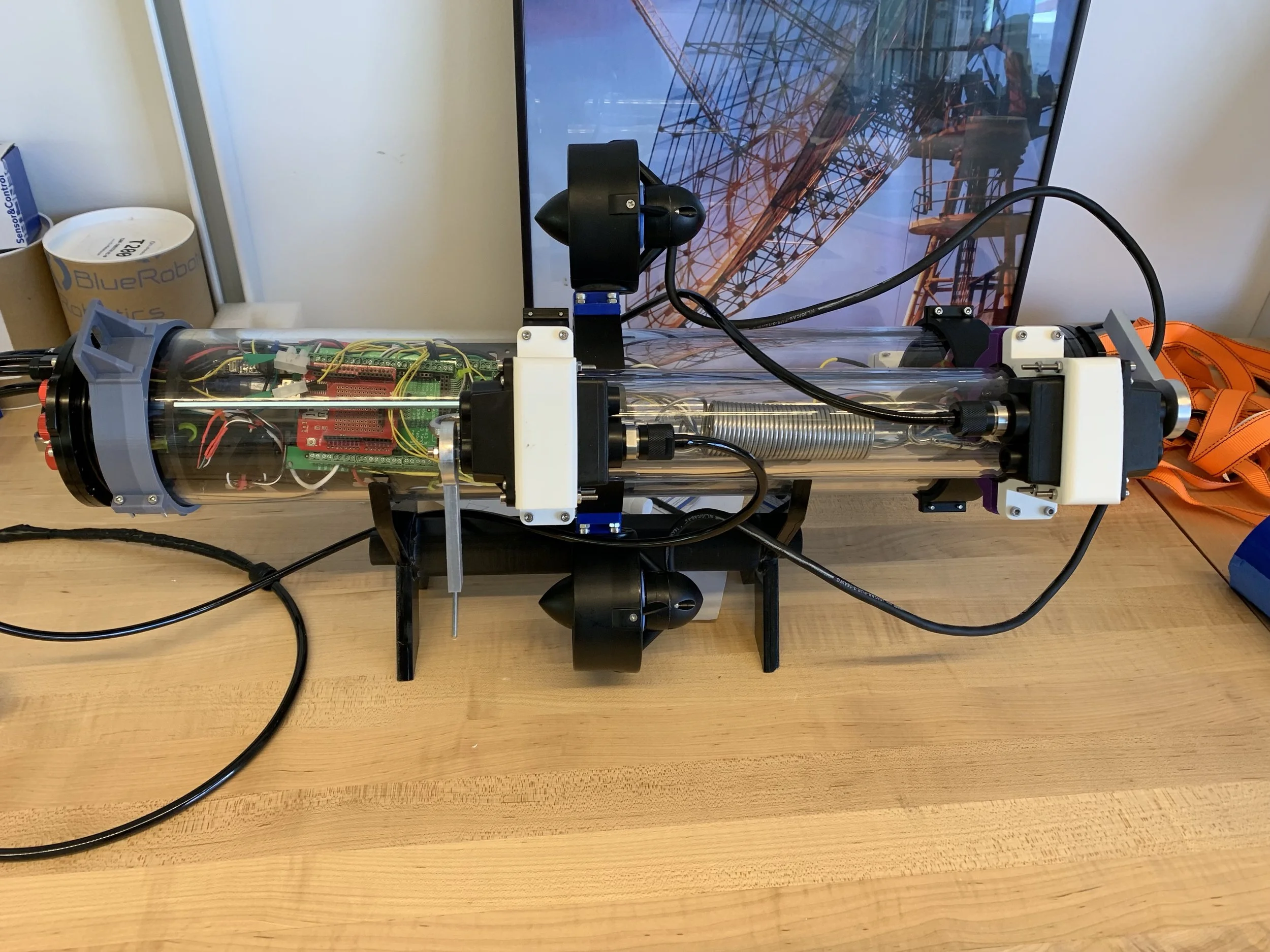
The Autonomous Underwater Vertical Project is a project that I worked on for 3 years in the Santa Clara University’s Robotic Systems Laboratory. Standard vertical profilers are often tethered devices that depend on either solar paneled buoys or ships of opportunity which lower the profiler down into a lake or ocean and collect data to categorize a column of water. Data collected usually includes pressure (which gives depth), temperature, salinity, turbidity, etc. The goal of this project was to create a tether-less, modular vertical sampler that could be used to take the basic sensor data of conventional vertical samplers while being comparatively low-cost and easy to use. The first prototype consisted of an acrylic tube to hold the electronics and utilized a rack and pinion drop weight system which would sink the profiler to a specified depth and then release the weight (a burlap sack of sand which would decompose in the ocean), allowing the profiler to float up to the surface. This design was then modified to use off the shelf underwater thrusters which would allow for multiple descents. The three pictures below show different iterations of the profiler—ranging from the drop weight system, to a single thruster, to a two thruster system. The bottom image and first video also shows a more recent addition: the water sample collection system I designed. This subsystem consists of a tube with two servos attached which seals at a certain depth specified and brings the water samples back up to the surface. This design was based off a Niskin bottle which is commonly used to collect underwater samples and ended up having a 95% collection success rate.


Other than designing and making parts/systems for the profiler, we also conduct lots of testing as we have a pending contact for multiple of these profilers to be used in surveying the artificial reef near Palos Verdes. As a result, I spend a large amount of time doing failure analysis to understand where tests failed and how we can improve the system. One example of this was where the profiler suddenly seemed to lose all power out on deployment. Eventually I was able to find a small amount of corrosion in one of the cable connections which implied that salt water got in through a bad seal and caused an electrical short. The image below shows the result of a faulty seal (left) and a new connector (right).