Underwater ROV Robotic Arm (Senior Capstone Project)

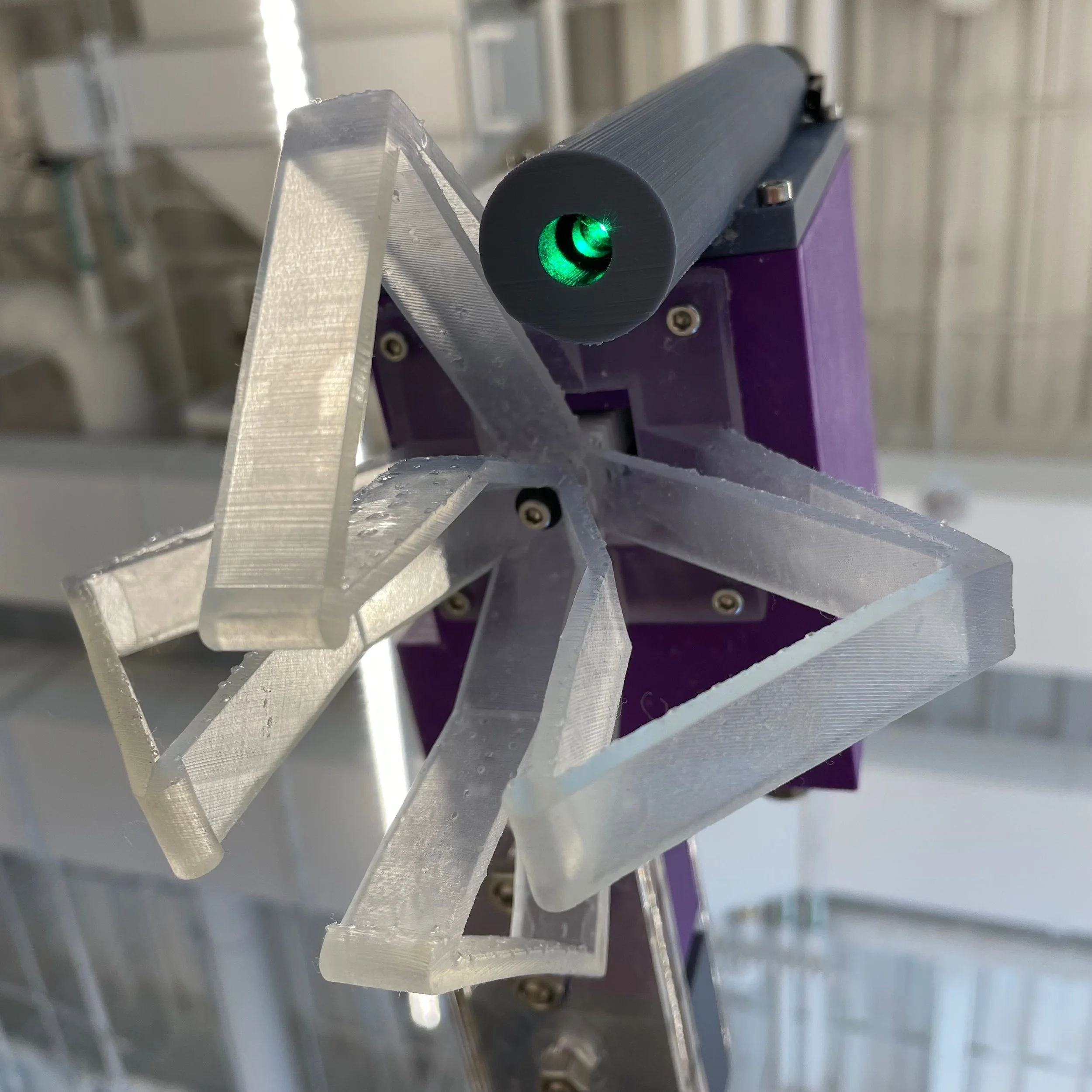
The three images above of the gripper show some of the different iterations that we went through. We originally started with a flexible filament that could be printed on one of the lab’s Prusa 3D printers, but the material did not have the rigidity needed to pick up heavier objects. Eventually we settled on a gripper made from 80A resin printed on a Formlabs SLA 3D printer. The gripper is actuated by a rack and pinion hidden in the housing, which also has an attachment point for a underwater laser pointer that is used to orient the arm operator when trying to pick up a sample via the camera. We were able to conduct multiple tests of this system both in a the lab’s mini testing pool, as well as at the Monterey Bay Aquarium Research Institute’s 30 foot deep testing tank (seen in the top two pictures).
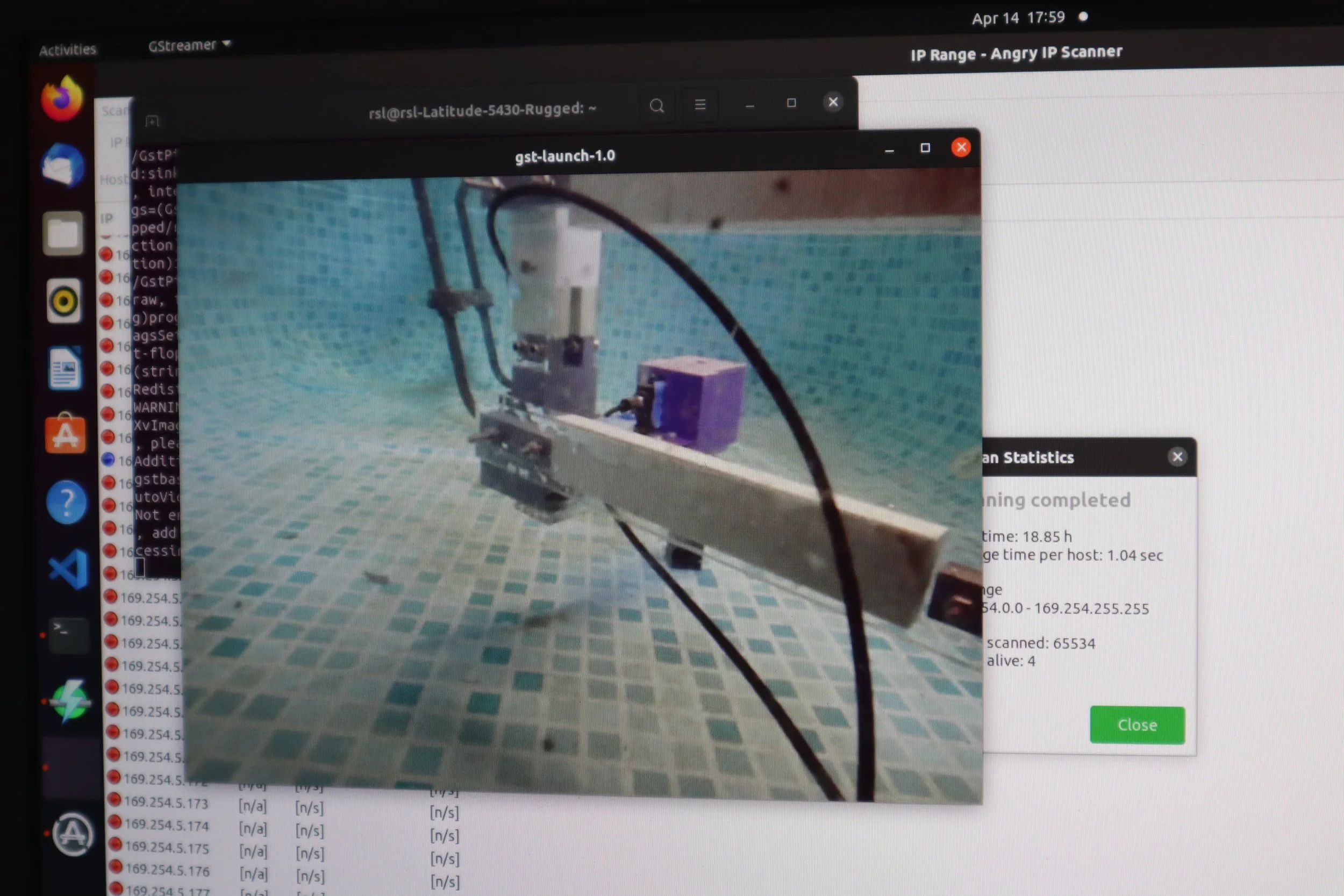
These two videos show the operation of the arm. It takes two people to operate the system. One person is the pilot (me), who controls the orientation of the ROV via its thrusters, and a second person who operates the arm. The video on the left shows what it looks like to the pilots of the ROV. As you can see, the on board camera quality is not great and future work consists of improving the camera quality and latency between the top side computer and the ROV.

One of my main contributions on the arm was the entire arm controls system. The goal was to create a velocity control scheme as that would allow for specification of which direction the arm should move in. Position control would require the known position of the sample in XYZ space, or the joint angles that would position the arm’s gripper at the sample. Since both of these are impractical, velocity control was needed. The Simulink block diagram was used to model this control scheme, and the video below shows this model running. Note how the arm is able to move in XYZ space linearly based on the input signals from a joystick controller. This control scheme was then implemented on the actual arm. Due to numerical integration, smaller movements (video on bottom right) shows better performance (watch the green laser pointer move along the line at the bottom of the testing pool).
For my Senior Design Capstone Project, my team created a prototype underwater robotic manipulator arm for one of Santa Clara University’s Robotic Systems Laboratory’s (RSL) underwater remotely operated vehicles (ROV). There were three overarching goals for this project which were
Creation of a prototype arm that would be able to utilize the workspace visible from the ROV’s camera
Creation of a soft gripper that would be capable of picking up samples from the ocean/lake floor without damaging them
Creation of a velocity control scheme that would allow for intuitive control of the robotic arm